19ویں اور 20ویں صدی میں بجلی کے شعبے میں سائنس نے تیزی سے ترقی کی جس کی وجہ سے الیکٹرک انڈکشن موٹرز کی تخلیق ہوئی۔ اس طرح کے آلات کی مدد سے صنعتی صنعت کی ترقی بہت آگے بڑھ چکی ہے اور اب غیر مطابقت پذیر الیکٹرک موٹروں کا استعمال کرتے ہوئے پاور مشینوں کے بغیر پلانٹس اور کارخانوں کا تصور کرنا بھی ناممکن ہے۔
مواد
ظہور کی تاریخ
ایک غیر مطابقت پذیر الیکٹرک موٹر کی تخلیق کی تاریخ 1888 میں شروع ہوتی ہے، جب نکولا ٹیسلا الیکٹرک موٹر سرکٹ کا پیٹنٹ کروایا، اسی سال الیکٹریکل انجینئرنگ کے شعبے میں ایک اور سائنسدان گیلیلیو فیراریس ایک غیر مطابقت پذیر مشین کے آپریشن کے نظریاتی پہلوؤں پر ایک مضمون شائع کیا۔
1889 میں روسی ماہر طبیعیات میخائل اوسیپووچ ڈولیوو-ڈوبرووولسکی ایک غیر مطابقت پذیر تھری فیز الیکٹرک موٹر کے لیے جرمنی میں پیٹنٹ حاصل کیا۔

ان تمام ایجادات نے برقی مشینوں کو بہتر بنانا ممکن بنایا اور صنعت میں برقی مشینوں کے بڑے پیمانے پر استعمال کا باعث بنا، جس نے پیداوار میں تمام تکنیکی عمل کو نمایاں طور پر تیز کیا، کام کی کارکردگی میں اضافہ کیا اور اس کی محنت کی شدت کو کم کیا۔
اس وقت، صنعت میں استعمال ہونے والی سب سے عام الیکٹرک موٹر ایک الیکٹرک مشین کا پروٹو ٹائپ ہے جسے Dolivo-Dobrovolsky نے بنایا ہے۔
ایک غیر مطابقت پذیر موٹر کے آپریشن کا آلہ اور اصول
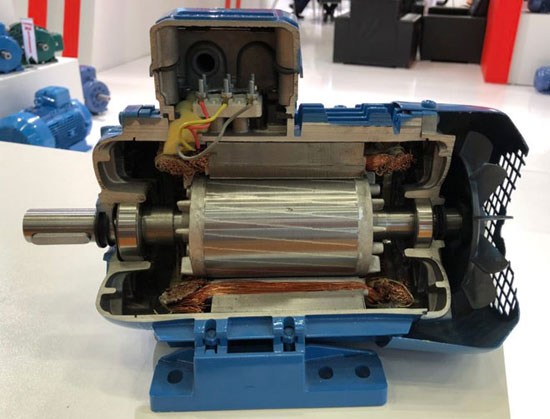
انڈکشن موٹر کے اہم اجزاء اسٹیٹر اور روٹر ہیں، جو ایک دوسرے سے ہوا کے فرق سے الگ ہوتے ہیں۔ انجن میں فعال کام ونڈنگز اور روٹر کے کور کے ذریعے کیا جاتا ہے۔
انجن کی مطابقت پذیری کو روٹر کی رفتار اور برقی مقناطیسی میدان کی گردش کی فریکوئنسی کے درمیان فرق سمجھا جاتا ہے۔
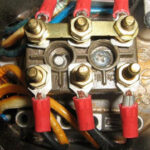
اسٹیٹر - یہ انجن کا ایک مقررہ حصہ ہے، جس کا بنیادی حصہ الیکٹریکل اسٹیل سے بنا ہے اور فریم میں نصب ہے۔ بستر ایسے مواد سے کاسٹ طریقے سے بنایا گیا ہے جو مقناطیسی نہیں ہے (کاسٹ آئرن، ایلومینیم)۔ سٹیٹر وائنڈنگز ایک تھری فیز سسٹم ہے جس میں تاروں کو 120 ڈگری کے ڈیفلیکشن اینگل کے ساتھ نالیوں میں بچھایا جاتا ہے۔ وائنڈنگز کے مراحل معیاری طور پر "ستارہ" یا "مثلث" اسکیموں کے مطابق نیٹ ورک سے جڑے ہوئے ہیں۔

روٹر یہ انجن کا متحرک حصہ ہے۔ غیر مطابقت پذیر الیکٹرک موٹروں کے روٹرز دو قسم کے ہوتے ہیں: گلہری پنجرے اور فیز روٹرز کے ساتھ۔ یہ اقسام روٹر وائنڈنگ کے ڈیزائن میں ایک دوسرے سے مختلف ہیں۔
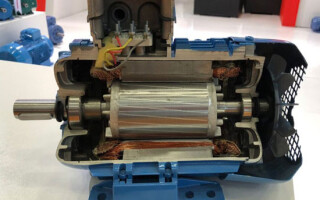
غیر مطابقت پذیر گلہری پنجرے والی موٹر
اس قسم کی برقی مشین کو سب سے پہلے M.O نے پیٹنٹ کیا تھا۔ Dolivo-Dobrovolsky اور مقبول طور پر کہا جاتا ہے "گلہری وہیل" ساخت کی ظاہری شکل کی وجہ سے. شارٹ سرکٹ والی روٹر وائنڈنگ تانبے کی سلاخوں پر مشتمل ہوتی ہے جس میں انگوٹھیوں کے ساتھ شارٹ سرکٹ ہوتا ہے (ایلومینیم، پیتل) اور روٹر کور کے سمیٹنے کے نالیوں میں ڈالا گیا۔ اس قسم کے روٹر میں متحرک رابطے نہیں ہوتے ہیں، اس لیے یہ موٹریں کام میں بہت قابل اعتماد اور پائیدار ہوتی ہیں۔
فیز روٹر کے ساتھ انڈکشن موٹر
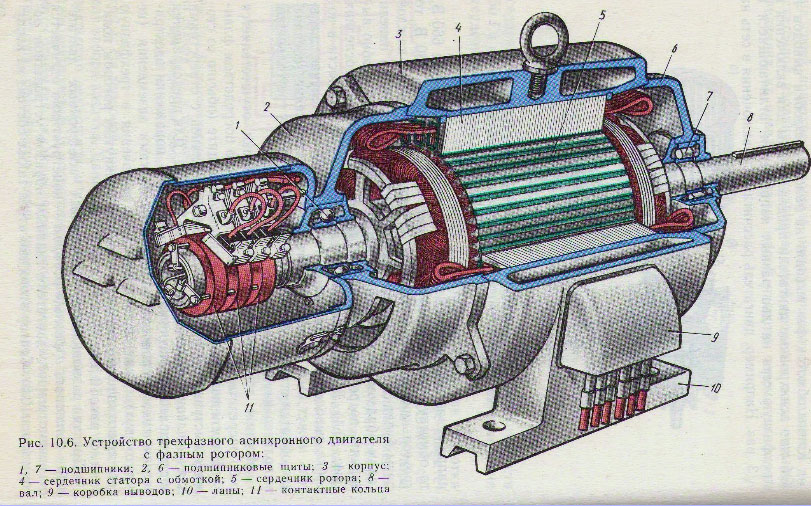
اس طرح کا آلہ آپ کو وسیع رینج میں کام کی رفتار کو ایڈجسٹ کرنے کی اجازت دیتا ہے۔ فیز روٹر تین فیز وائنڈنگ ہے، جو "ستارہ" یا مثلث اسکیموں کے مطابق جڑا ہوا ہے۔ ایسی الیکٹرک موٹرز میں ڈیزائن میں خاص برش ہوتے ہیں، جن کی مدد سے آپ روٹر کی رفتار کو ایڈجسٹ کر سکتے ہیں۔ اگر اس طرح کے انجن کے میکانزم میں ایک خاص ریوسٹیٹ شامل کیا جائے، تو جب انجن شروع کیا جائے گا، تو فعال مزاحمت کم ہو جائے گی اور اس طرح شروع ہونے والے کرنٹ کم ہو جائیں گے، جو برقی نیٹ ورک اور خود ڈیوائس کو بری طرح متاثر کرتے ہیں۔
آپریٹنگ اصول
جب سٹیٹر وائنڈنگز پر برقی رو لگائی جاتی ہے تو مقناطیسی بہاؤ ہوتا ہے۔ چونکہ مراحل ایک دوسرے کے مقابلے میں 120 ڈگری تک منتقل ہوتے ہیں، اس کی وجہ سے، وائنڈنگز میں بہاؤ گھومتا ہے۔ اگر روٹر شارٹ سرکیٹ ہے، تو اس طرح کی گردش کے ساتھ، روٹر میں ایک کرنٹ ظاہر ہوتا ہے، جو ایک برقی مقناطیسی میدان بناتا ہے۔ ایک دوسرے کے ساتھ تعامل کرتے ہوئے، روٹر اور سٹیٹر کے مقناطیسی میدان برقی موٹر کے روٹر کو گھومنے کا سبب بنتے ہیں۔ اگر روٹر فیز ہے، تو اسٹیٹر اور روٹر پر بیک وقت وولٹیج کا اطلاق ہوتا ہے، ہر میکانزم میں ایک مقناطیسی میدان ظاہر ہوتا ہے، وہ ایک دوسرے کے ساتھ تعامل کرتے ہیں اور روٹر کو گھماتے ہیں۔
غیر مطابقت پذیر موٹرز کے فوائد
| گلہری پنجرے کے روٹر کے ساتھ | فیز روٹر کے ساتھ |
|---|---|
| 1. سادہ ڈیوائس اور لانچ سرکٹ | 1. چھوٹا شروع ہونے والا کرنٹ |
| 2. کم مینوفیکچرنگ لاگت | 2. گردش کی رفتار کو ایڈجسٹ کرنے کی صلاحیت |
| 3. بڑھتے ہوئے بوجھ کے ساتھ، شافٹ کی رفتار تبدیل نہیں ہوتی ہے۔ | 3. رفتار کو تبدیل کیے بغیر چھوٹے اوورلوڈز کے ساتھ کام کریں۔ |
| 4. قلیل مدتی اوورلوڈز کو برداشت کرنے کے قابل | 4. خودکار آغاز لاگو کیا جا سکتا ہے |
| 5. قابل اعتماد اور آپریشن میں پائیدار | 5. ایک بڑا torque ہے |
| 6. کام کے تمام حالات کے لیے موزوں ہے۔ | |
| 7. ایک اعلی کارکردگی ہے |
غیر مطابقت پذیر موٹروں کے نقصانات
| گلہری پنجرے کے روٹر کے ساتھ | فیز روٹر کے ساتھ |
|---|---|
| 1. روٹر کی رفتار سایڈست نہیں ہے | 1. بڑے طول و عرض |
| 2. چھوٹا شروع ہونے والا ٹارک | 2. کارکردگی کم ہے۔ |
| 3. ہائی سٹارٹنگ کرنٹ | 3. برش پہننے کی وجہ سے بار بار دیکھ بھال |
| 4. کچھ ڈیزائن کی پیچیدگی اور متحرک رابطوں کی موجودگی |
غیر مطابقت پذیر موٹرز بہترین مکینیکل خصوصیات کے ساتھ بہت موثر ڈیوائسز ہیں، جو انہیں استعمال کی فریکوئنسی میں رہنما بناتی ہیں۔
آپریٹنگ موڈز

ایک غیر مطابقت پذیر قسم کی الیکٹرک موٹر ایک عالمگیر طریقہ کار ہے اور اس کے آپریشن کی مدت کے لیے کئی طریقے ہیں:
- مسلسل؛
- کم وقت کے لیے؛
- متواتر؛
- بار بار قلیل مدتی؛
- خاص۔
مسلسل موڈ - غیر مطابقت پذیر آلات کے آپریشن کا بنیادی موڈ، جس کی خصوصیت الیکٹرک موٹر کے بغیر کسی مستقل بوجھ کے شٹ ڈاؤن کے مسلسل آپریشن سے ہوتی ہے۔ آپریشن کا یہ موڈ سب سے زیادہ عام ہے، ہر جگہ صنعتی اداروں میں استعمال ہوتا ہے۔
لمحاتی موڈ - کام کرتا ہے جب تک کہ ایک مستقل بوجھ ایک خاص وقت تک نہ پہنچ جائے (10 سے 90 منٹ)، زیادہ سے زیادہ گرم ہونے کا وقت نہ ہونا۔ اس کے بعد یہ آف ہو جاتا ہے۔ یہ موڈ کام کرنے والے مادوں کی فراہمی کے وقت استعمال ہوتا ہے (پانی، تیل، گیس) اور دیگر حالات۔
متواتر موڈ - کام کے دورانیے کی ایک خاص قدر ہوتی ہے اور کام کے چکر کے اختتام پر اسے بند کر دیا جاتا ہے۔ آپریٹنگ موڈ اسٹارٹ ورک اسٹاپ۔ ایک ہی وقت میں، یہ ایسے وقت کے لیے بند ہو سکتا ہے جس کے دوران اس کے پاس بیرونی درجہ حرارت پر ٹھنڈا ہونے اور دوبارہ آن ہونے کا وقت نہیں ہوتا ہے۔
وقفے وقفے سے موڈ - انجن زیادہ سے زیادہ گرم نہیں ہوتا ہے، لیکن اس کے پاس بیرونی درجہ حرارت پر ٹھنڈا ہونے کا وقت بھی نہیں ہوتا ہے۔ یہ ایلیویٹرز، ایسکلیٹرز اور دیگر آلات میں استعمال ہوتا ہے۔
خصوصی نظام - شامل کرنے کی مدت اور مدت صوابدیدی ہے۔
الیکٹریکل انجینئرنگ میں، برقی مشینوں کے الٹ جانے کا ایک اصول ہے - اس کا مطلب یہ ہے کہ یہ آلہ برقی توانائی کو مکینیکل توانائی میں تبدیل کر سکتا ہے اور مخالف حرکتیں انجام دے سکتا ہے۔
غیر مطابقت پذیر الیکٹرک موٹریں بھی اس اصول سے مطابقت رکھتی ہیں اور ان میں ایک موٹر اور جنریٹر کا موڈ ہوتا ہے۔
موٹر موڈ - ایک غیر مطابقت پذیر الیکٹرک موٹر کے آپریشن کا بنیادی طریقہ۔ جب وِنڈنگز پر وولٹیج لگائی جاتی ہے، تو ایک برقی مقناطیسی ٹارک پیدا ہوتا ہے، جو روٹر کو شافٹ کے ساتھ گھسیٹتا ہے، اور اس طرح شافٹ گھومنے لگتا ہے، انجن مفید کام کرتے ہوئے مستقل رفتار تک پہنچ جاتا ہے۔
جنریٹر موڈ - روٹر کی گردش کے دوران موٹر وائنڈنگز میں برقی رو کے جوش کے اصول پر مبنی۔ اگر موٹر روٹر کو میکانکی طور پر گھمایا جاتا ہے، تو سٹیٹر وائنڈنگز پر ایک الیکٹرو موٹیو فورس بنتی ہے، وائنڈنگز میں ایک کپیسیٹر کی موجودگی میں، ایک capacitive کرنٹ ہوتا ہے۔اگر کیپیسیٹر کی گنجائش ایک خاص قدر ہے، انجن کی خصوصیات پر منحصر ہے، تو جنریٹر خود کو پرجوش کرے گا اور تین فیز وولٹیج کا نظام ظاہر ہوگا۔ اس طرح گلہری پنجرے والی موٹر جنریٹر کے طور پر کام کرے گی۔
غیر مطابقت پذیر موٹروں کی رفتار کا کنٹرول
غیر مطابقت پذیر الیکٹرک موٹروں کی گردش کی رفتار کو منظم کرنے اور ان کے آپریٹنگ طریقوں کو کنٹرول کرنے کے لیے، درج ذیل طریقے ہیں:
- تعدد - جب برقی نیٹ ورک میں کرنٹ کی فریکوئنسی تبدیل ہوتی ہے تو برقی موٹر کی گردش کی فریکوئنسی بدل جاتی ہے۔ اس طریقہ کے لیے فریکوئنسی کنورٹر کہلانے والا آلہ استعمال کیا جاتا ہے۔
- Rheostatic - جب روٹر میں rheostat کی مزاحمت بدل جاتی ہے تو گردش کی رفتار بدل جاتی ہے۔ یہ طریقہ ابتدائی ٹارک اور کریٹیکل سلپ کو بڑھاتا ہے۔
- نبض - ایک کنٹرول کا طریقہ جس میں موٹر پر ایک خاص قسم کا وولٹیج لگایا جاتا ہے۔
- "اسٹار" سرکٹ سے "مثلث" سرکٹ میں الیکٹرک موٹر کے آپریشن کے دوران وائنڈنگز کو تبدیل کرنا، جو شروع ہونے والے کرنٹ کو کم کرتا ہے؛
- گلہری-کیج روٹرز کے لیے قطب جوڑا تبدیل کنٹرول؛
- زخم روٹر کے ساتھ موٹروں کے لئے آمادہ رد عمل کا کنکشن۔
الیکٹرانک نظام کی ترقی کے ساتھ، مختلف غیر مطابقت پذیر قسم کی برقی موٹروں کا کنٹرول زیادہ موثر اور درست ہوتا جا رہا ہے۔ اس طرح کے انجن دنیا میں ہر جگہ استعمال ہوتے ہیں، اس طرح کے میکانزم کے ذریعے انجام پانے والے کاموں کی تعداد ہر روز بڑھ رہی ہے، اور ان کی ضرورت کم نہیں ہو رہی ہے۔
ملتے جلتے مضامین: